Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI
Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVIAusgangssituation

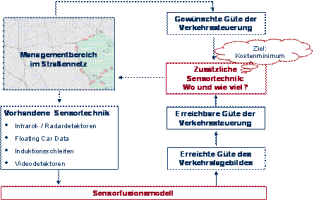
Im Projekt Operative Regionale Integrierte und Optimierte Korridorsteuerung in Nürnberg (ORINOKO), das der Bund im Rahmen des Forschungsprogramms »Verkehrsmanagement 2010« fördert, entwickelt das Fraunhofer IVI zwischen 2004 und 2008 praktikable und finanzierbare Lösungsansätze für eine umfassende stadtweite Verkehrslageerfassung und für die weitere Verbesserung der Lichtsignalsteuerung. Hierzu werden Datenfusionsverfahren, Prognosetechniken sowie neue makroskopische netzadaptive Steuerungsverfahren untersucht und exemplarisch umgesetzt. Ein wichtiges Augenmerk richtet sich auf die Übertragbarkeit der Lösungsansätze auf andere Städte. Mit Videodetektion und Taxi-basierten floating car data (FCD) werden in ORINOKO zwei Verkehrslageerfassungssysteme weiterentwickelt, die wesentlich wirtschaftlicher erscheinen als Induktionsschleifen und die sich auch für einen flächendeckenden Einsatz im gesamten Stadtgebiet gut einsetzen lassen.