 Fraunhofer Institute for Transportation and Infrastructure Systems IVI
Fraunhofer Institute for Transportation and Infrastructure Systems IVITruckTrix® Algorithm
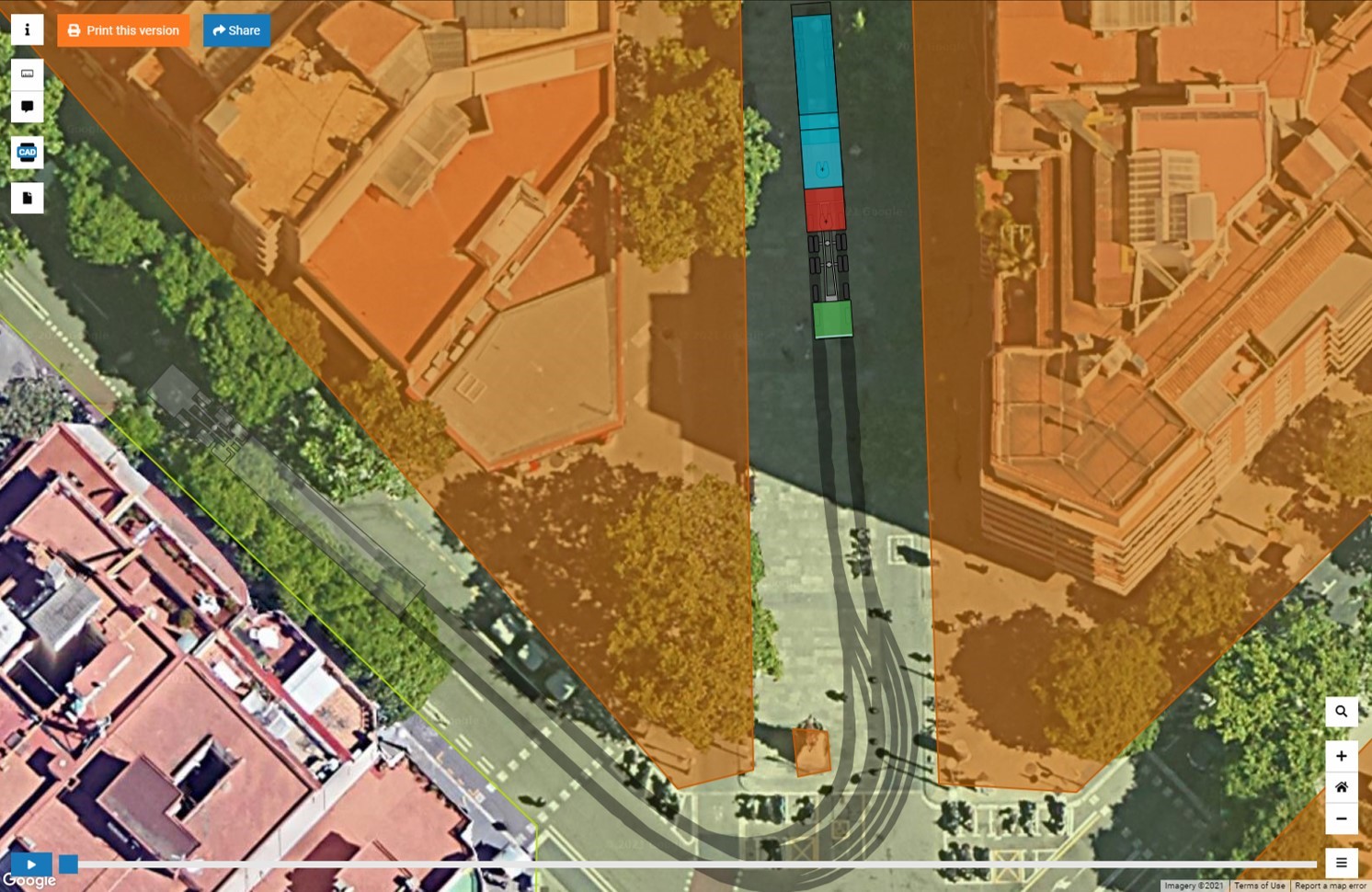
The TruckTrix® is an algorithm1 developed at the Fraunhofer IVI. It automatically determines maneuvers that enable multi-module vehicles to reach a given destination based on digital maps, taking into account their complex vehicle geometry and kinematics. The digital maps contain information about trafficable areas and obstacles to be avoided. The TruckTrix® algorithm is based on the A-Star (A*) graph search approach with special cost-functional2 which is responsible for path optimization. Furthermore, we have provided several methods for path post-processing that help create well-drivable trajectories for vehicles with complex geometries as well as for highly automated vehicles.
1 TruckTrix® Paper 2013: http://publica.fraunhofer.de/dokumente/N-300510.html
2 TruckTrix® Paper 2021: http://publica.fraunhofer.de/dokumente/N-642541.html