 Fraunhofer Institute for Transportation and Infrastructure Systems IVI
Fraunhofer Institute for Transportation and Infrastructure Systems IVIDescription
Thanks to its modular architecture, the helyOS® Control Tower framework offers seamless integration of state-of-the-art motion planning algorithms. TruckTrix® Path provides highly precise tracks to navigate even complex articulated vehicles through narrow passages.
TruckTrix® Coop goes one step further and optimizes the operation of mobile machines at fleet level. By applying the innovative OrchesTruck algorithm, it solves the fundamental challenge of coordinating multiple robots following their individual paths in a shared workspace. By using latest techniques in robotics research complemented with support for complex vehicle structures, robot travel times are minimized and mutual collisions are avoided. This makes TruckTrix® Coop the ideal planning service for automating trucks in logistics hubs, seaports, and other premises with limited space.
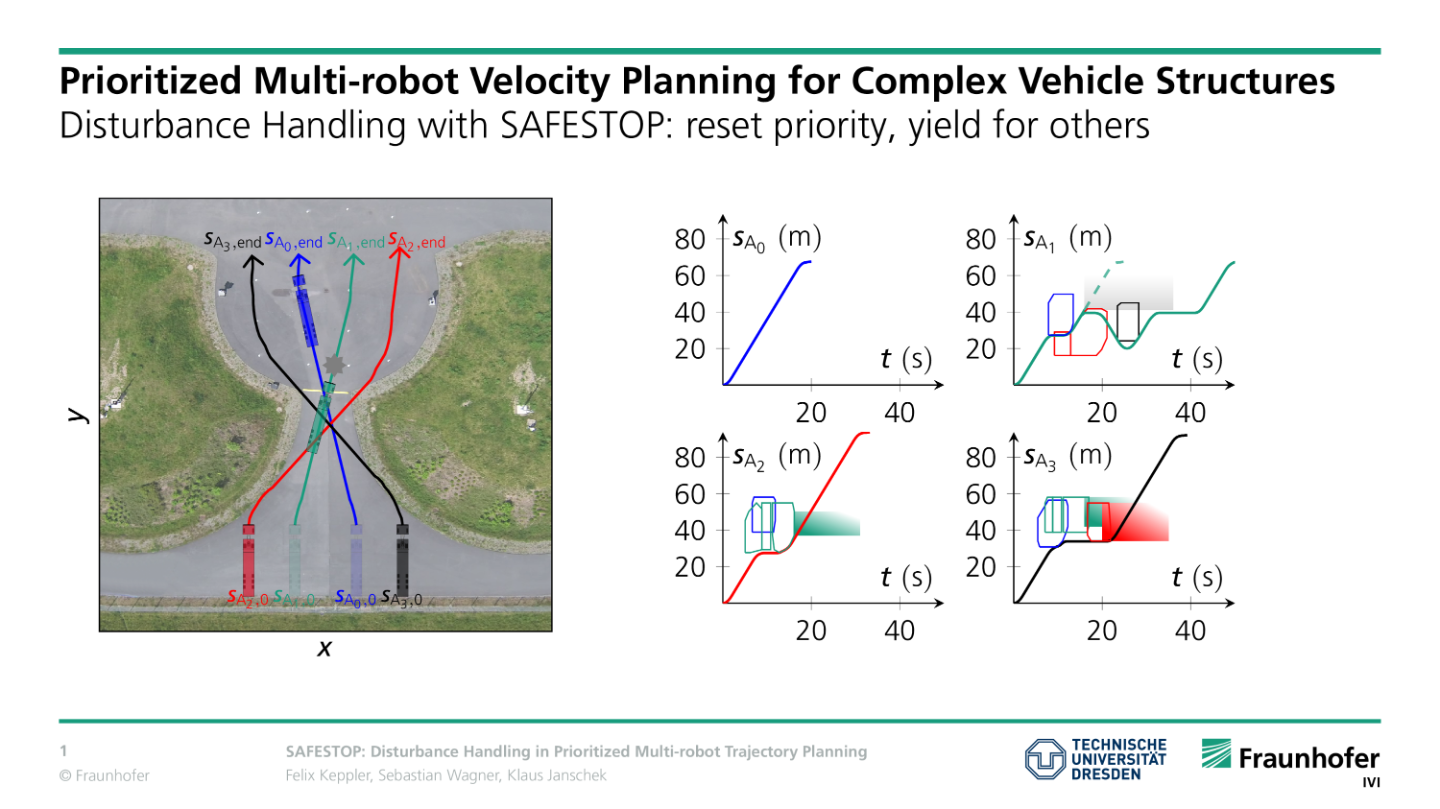
But what if precisely coordinated trajectories cannot be executed as planned due to dynamic obstacles or interaction with non-automated traffic? Relax! TruckTrix®-Coop features the SAFESTOP algorithm developed by Fraunhofer IVI and TU Dresden, which aims to minimize the impact of disturbances on the overall system performance by quickly maneuvering affected vehicles out of shared intersections. Thus, the consistency of other planned trajectories is maintained and affected vehicles can wait for updated plans or obstacle clearance.