 Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI
Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVIBeschreibung
Dank seiner modularen Architektur bietet das helyOS® Control Tower Framework eine nahtlose Integration modernster Algorithmen der Bewegungsplanung. TruckTrix® Path liefert hochpräzise Bewegungspfade, um selbst komplexe Gelenkfahrzeuge durch enge Passagen navigieren zu können.
TruckTrix® Coop geht noch einen Schritt weiter und optimiert den Betrieb mobiler Maschinen auf Flottenebene. Durch die Anwendung des innovativen OrchesTruck-Algorithmus löst es die grundlegende Herausforderung, mehrere Roboter zu koordinieren, die ihren jeweils individuellen Wegen in einer gemeinsamen Arbeitsumgebung folgen. Durch den Einsatz neuester Techniken aus der Robotikforschung, ergänzt um die Unterstützung komplexer Fahrzeugstrukturen, werden die Fahrzeiten der Roboter minimiert und gegenseitige Kollisionen vermieden. Das macht TruckTrix® Coop zum idealen Planungsdienst für die Automatisierung von Lkw in Logistikzentren, Seehäfen und anderen Räumlichkeiten mit begrenztem Platzangebot.
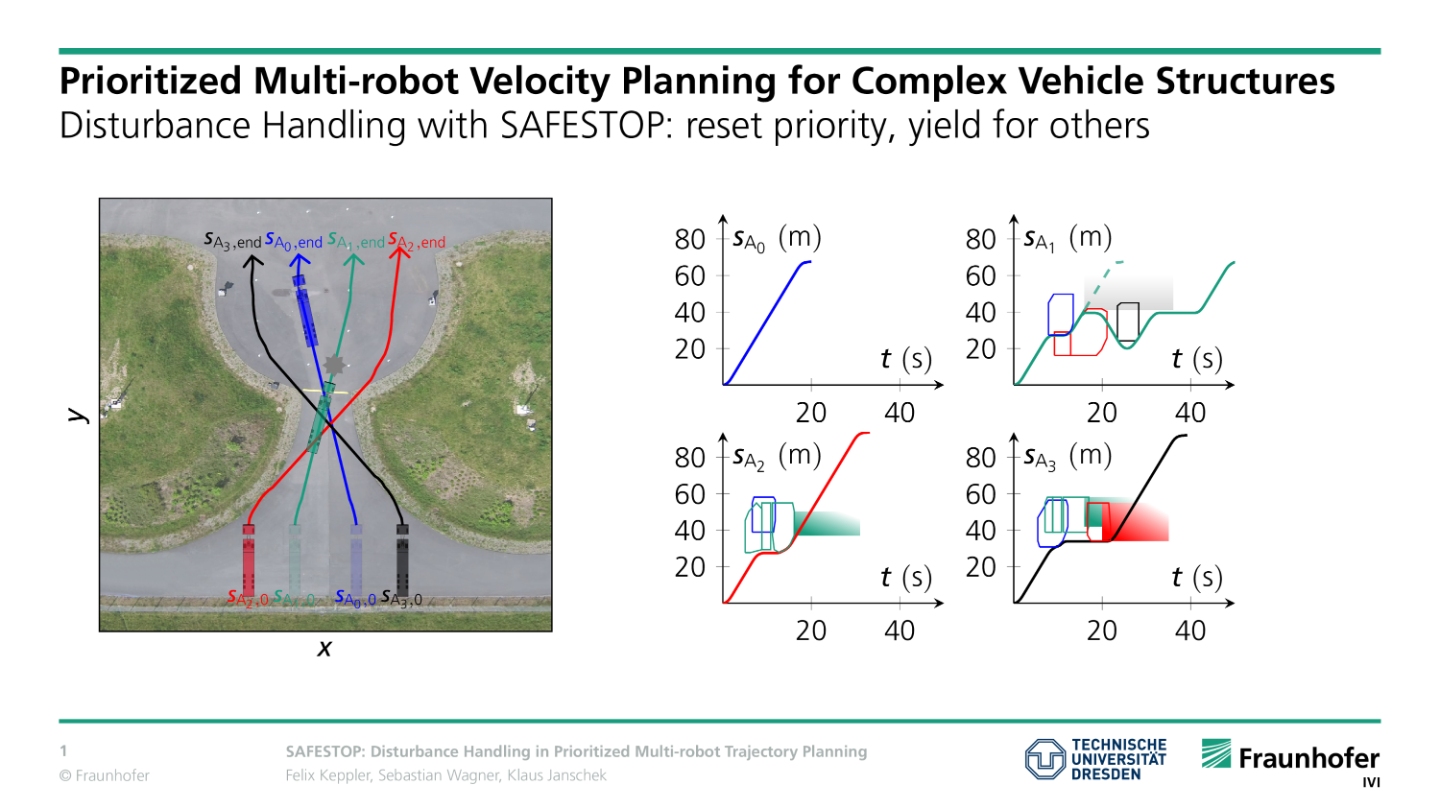
Was aber, wenn exakt koordinierte Bewegungspfade aufgrund dynamischer Hindernisse oder der Interaktion mit dem nicht-automatisierten Verkehr nicht wie geplant ausgeführt werden können? Keine Sorge! TruckTrix® Coop verfügt über den vom Fraunhofer IVI und der TU Dresden entwickelten SAFESTOP-Algorithmus, der darauf abzielt, die Auswirkungen von Störungen auf die Gesamtleistung des Systems zu minimieren, indem betroffene Fahrzeuge schnell aus gemeinsam genutzten Kreuzungen herausmanövriert werden. Auf diese Weise bleibt die Konsistenz anderer geplanter Bewegungspfade erhalten und die betroffenen Fahrzeuge können auf aktualisierte Pläne oder die Beseitigung von Hindernissen warten.