 Fraunhofer Institute for Transportation and Infrastructure Systems IVI
Fraunhofer Institute for Transportation and Infrastructure Systems IVI
Automated driving is a highly complex subject. In the future, enhanced functionally safe infrastructure will enable safe and efficient cooperative, connected automated mobility (CCAM).
The infrastructure will detect and analyze the traffic situation in order to
- first, inform vehicles via car2X communications,
- second, provide assistance for automated vehicles, and
- third, control vehicles through the infrastructure.
This ambitious goal will be reached by seamlessly integrating conventional, connected and automated vehicles via innovative basic services on the one hand and new features on the other hand with the help of cooperative intelligent transport systems (C-ITS) solutions. By using smart infrastructure, the operational design domain can be expanded especially in complex environments.
Fraunhofer IVI researchers support stakeholders through their professional expertise on C-ITS and CCAM in the field of connected automated driving. They also develop services and implement them in secure and intelligent infrastructure.
So-called Day1-C-ITS services, such as traffic light phase assistance and public transport prioritization, as well as Day1.5 services, such as the guardian angel function for vulnerable road users (VRU), are investigated and executed in a harmonized European way.
In many projects, road infrastructure provides support for automated driving functions in complex scenarios with the aim of enabling the evolutionary transfer of automated driving from non-public to urban transport areas.
Our expertise includes:
- Development and operation incl. monitoring of the Dresden Digital Testbed
- Design, testing and operation of C-ITS messages and services for connected cooperative driving (e.g. prioritization in public transport with C-ITS)
- Planning, evaluation and monitoring of the C-ITS and mobile communications infrastructure
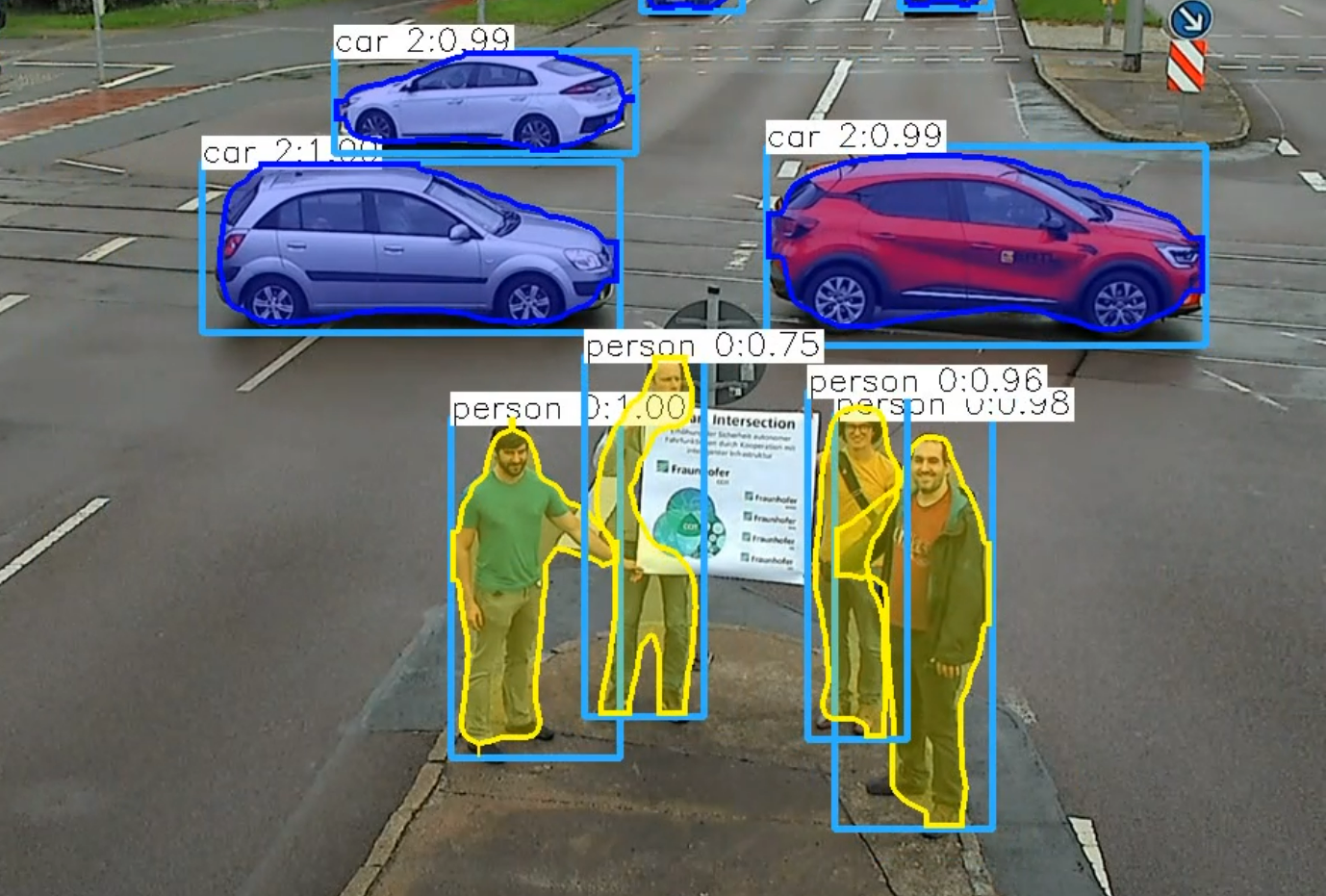
- Environment detection and evaluation as well as extraction of dynamic object maps and driving scenarios
- Evaluation of the interaction between vehicle (ODD) and infrastructure (ISAD) for automated driving (e.g. municipal roadmaps)
- Infrastructure assistance for automated driving in public environments and at depots
- Safe teleoperated driving via mobile communications incl. control center