 Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI
Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI
Automatisiertes Fahren ist hochkomplex. Zukünftig kann funktional sichere Infrastruktur dazu befähigt werden, eine sichere und effiziente vernetzt-automatisierte Mobilität – Cooperative, Connected and Automated Mobility (CCAM) – zu ermöglichen.
Die Infrastruktur wird Verkehrszustände erfassen und analysieren, um
- in einem ersten Schritt Fahrzeuge via Car2X-Kommunikation zu informieren,
- in einem zweiten Schritt automatisierten Fahrzeugen zu assistieren und letztlich
- in einem dritten Schritt Fahrzeuge aus der Infrastruktur zu steuern.
Durch die nahtlose Integration von konventionellen, vernetzten und automatisierten Fahrzeugen über innovative Basisdienste einerseits und neue Features andererseits wird dieses ambitionierte Ziel mittels kooperativer Lösungen des intelligenten Verkehrs (C-ITS) erreicht. Mit Hilfe der smarten Infrastruktur lassen sich die Einsatzbereiche von Fahrzeugen – Operational Design Domain – besonders in komplexen Umgebungen erweitern.
Das Fraunhofer IVI unterstützt Akteure mit der fachlichen Expertise für C-ITS und CCAM auf dem Gebiet des vernetzt-automatisierten Fahrens, entwickelt und implementiert Services und setzt diese auf einer sicheren und intelligenten Infrastruktur um.
Sogenannte Day1-C-ITS-Services des vernetzten Fahrens, wie der Ampelphasenassistent oder die Beschleunigung des öffentlichen Verkehrs, oder Day1.5-Services, wie die Schutzengelfunktion für gefährdete Verkehrsteilnehmer (VRU), werden erforscht und harmonisiert umgesetzt.
In vielen der Projekte leistet die Infrastruktur Unterstützung bei automatisierten Fahrfunktionen in komplexen Szenarien, damit sie sich evolutionär von nicht-öffentlichen Bereichen in den urbanen Straßenraum entwickeln kann.
Unsere Expertise umfasst:
- Aufbau und Betrieb inkl. Monitoring des Digitalen Testfelds Dresden
- Konzeption, Test und Betrieb von C-ITS-Nachrichten und Services für vernetztes kooperatives Fahren (bspw. Priorisierung im ÖPNV mit C-ITS)
- Planung, Bewertung und Monitoring der C-ITS- und Mobilfunk-Kommunikationsinfrastruktur
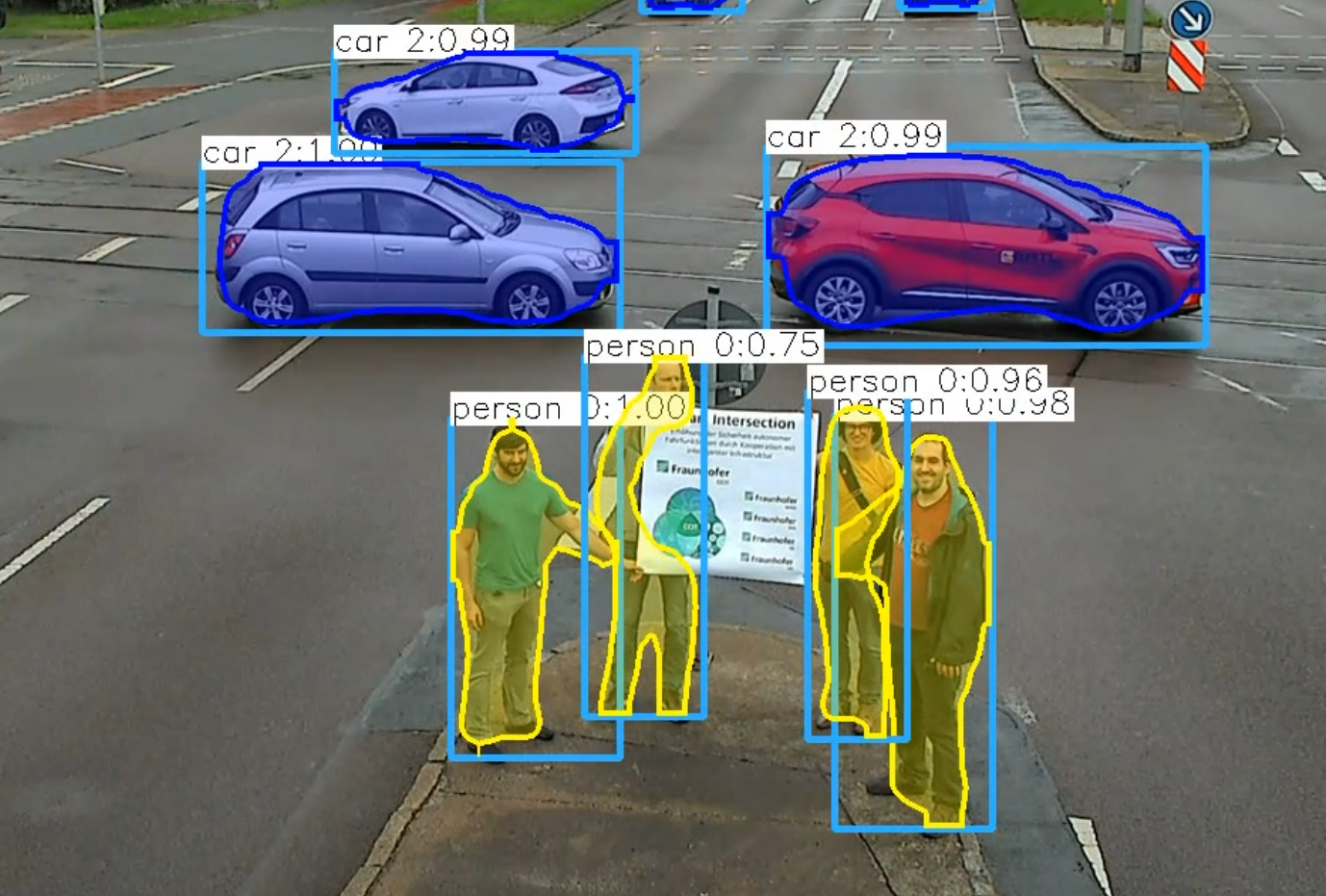
- Umfelderfassung und Bewertung sowie Extraktion von dynamischen Objektkarten und Fahrszenarien
- Bewertung des Zusammenspiels von Fahrzeug (ODD) und Infrastruktur (ISAD) für automatisiertes Fahren (bspw. kommunale Roadmaps)
- Infrastrukturassistenz für automatisiertes Fahren im öffentlichen Umfeld und auf dem Betriebshof
- Sicheres teleoperiertes Fahren via Mobilfunk inkl. Leitstelle