 Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI
Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI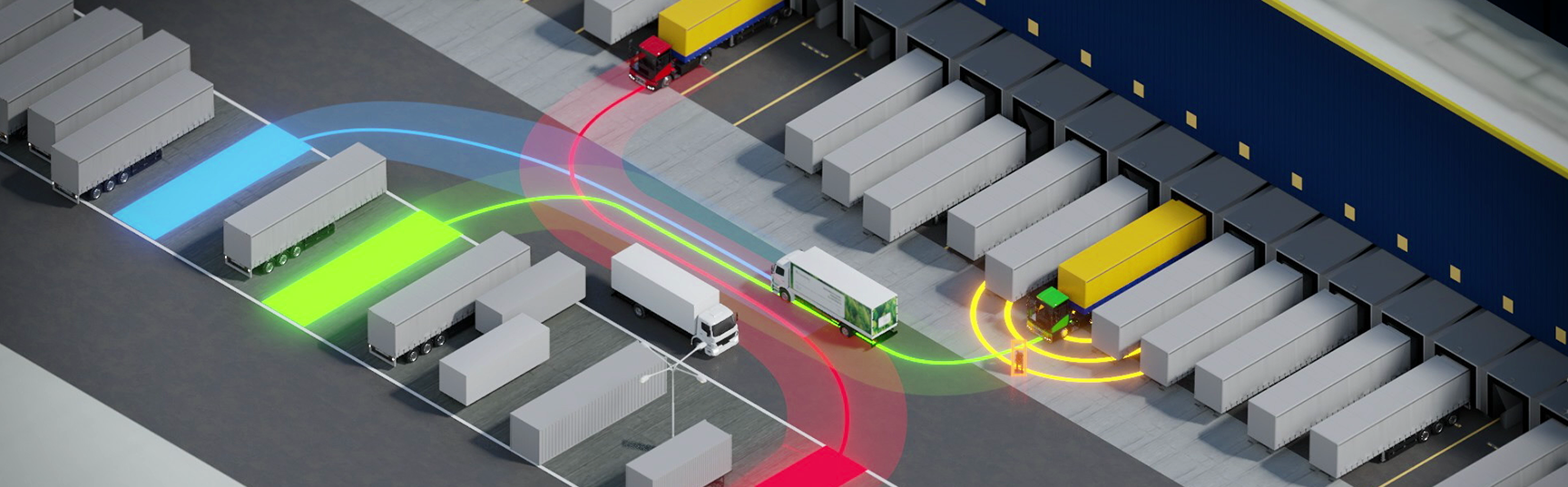
Effiziente und sichere Automatisierung für Logistikhöfe
Die Automatisierung von Fahrzeugen in begrenzten Bereichen – etwa auf Logistikhöfen – ist ein zunehmend dynamisches Forschungsfeld mit hohem wirtschaftlichen Potenzial. Im Vergleich zum automatisierten Fahren auf öffentlichen Straßen bieten diese kontrollierten Umgebungen bereits kurzfristig konkrete Chancen für effiziente, sichere und skalierbare Automatisierungslösungen.
Eine zentrale Herausforderung beim Betrieb mehrerer Fahrzeuge auf engem Raum ist die Koordination der einzelnen Fahrzeugbewegungen. Um Kollisionen und Deadlock-Situationen zu vermeiden, in denen Fahrzeuge sich gegenseitig den Weg blockieren, bedarf es einer präzisen Bewegungsplanung und intelligenter Kommunikation.
Das Fraunhofer IVI unterstützt Sie entlang der gesamten Entwicklungskette der Fahrzeugautomatisierung: von globaler Trajektorienplanung über Mehragentenvernetzung und -koordination bis hin zu Spurführungsregelung, Hindernisumfahrung und Systemintegration in bestehende Infrastrukturen.



